Tutorial: Computational Cytometry#
Cytoflow includes modules and views for analyzing and visualizing high-dimensional data from flow cytometry experiments. Often called computational cytometry, these semi-supervised and unsupervised analysis pipelines are generally broken into three major pieces:
Clean and pre-process the data. Check for tubes that have artifacts / discontinuities in the flow rate, for example, and then compensate for spill-over between channels. Possibly warp the channels between tubes to bring peaks into registration. Because these data are pre-processed, those capabilities are not demonstrated here, but see the Bleedthrough Compensation, FlowClean and Registration operations details on how to perform these cleaning steps.
Attention
Often, pre-processing also involves scaling data with a logarithmic or biexponential transformation. However, Cytoflow maintains the underlying data in its unscaled form, and scales it as needed for processing or visualization.
Cluster or reduce the dimensionality of the data. Cytoflow includes several clustering algorithms – KMeans, FlowPeaks, and self-organizing maps – and two dimensionality reduction methods, principle components analysis and t*-distributed stochastic neighbor embedding.* Self-organizing maps and tSNE are demonstrated below.
Visualize the data to explore the biology. For dimensionality-reduction methods like tSNE and PCA, standard scatterplots are used. However, for high-dimensional clustering, a minimum-spanning tree has become common. Cytoflow allows a user to create both visualizations, and each is demonstrated below as well.
This notebook demonstrates self-organized maps (SOM), minimum-spanning trees, and t-distributed stochastic neighbor embedding (t-SNE) using data from Saeys Y, Van Gassen S, Lambrecht BN. Computational flow cytometry: helping to make sense of high-dimensional immunology data. Nature Reviews Immunology 16:449-462 (2016). The workflow below reproduces many of the figures from that paper. (It’s a great paper – go read it!)
The example data files are taken from the hierarchical gating tutorial, which applied manual gating to identify NK, NK T, T and B cells; neutrophils, DCs, basophils, and macrophages. After running the operations in that workflow, I used the Export FCS operation to export each different cell type in a different .FCS file. These manual gates serve as the “ground truth” to evaluate the performance of the clustering, dimensionality reduction, and visualization algorithms.
If you’d like to follow along, you can do so by downloading one of the cytoflow-#####-examples-advanced.zip files from the Cytoflow releases page on GitHub. These example files are in the saeys/ sub-folder.
One final note. I am not an immunologist. This is an explanatory example, using publically available data, to illustrate the software’s functionality. Please don’t write me and tell me I’m using the wrong markers or the wrong dyes.
Import the data#
Open the experiment setup panel and set it up as in the image below. We will include just one piece of per-tube metadata, the cell type from the hierarchical gating example.

There are about 230,000 events across the 8 samples, so this is not a toy data set! Let’s remove unused channels (FITC, AmCyan, Pacific Blue) and the SSC channels, then rename the remaining ones to track their markers.
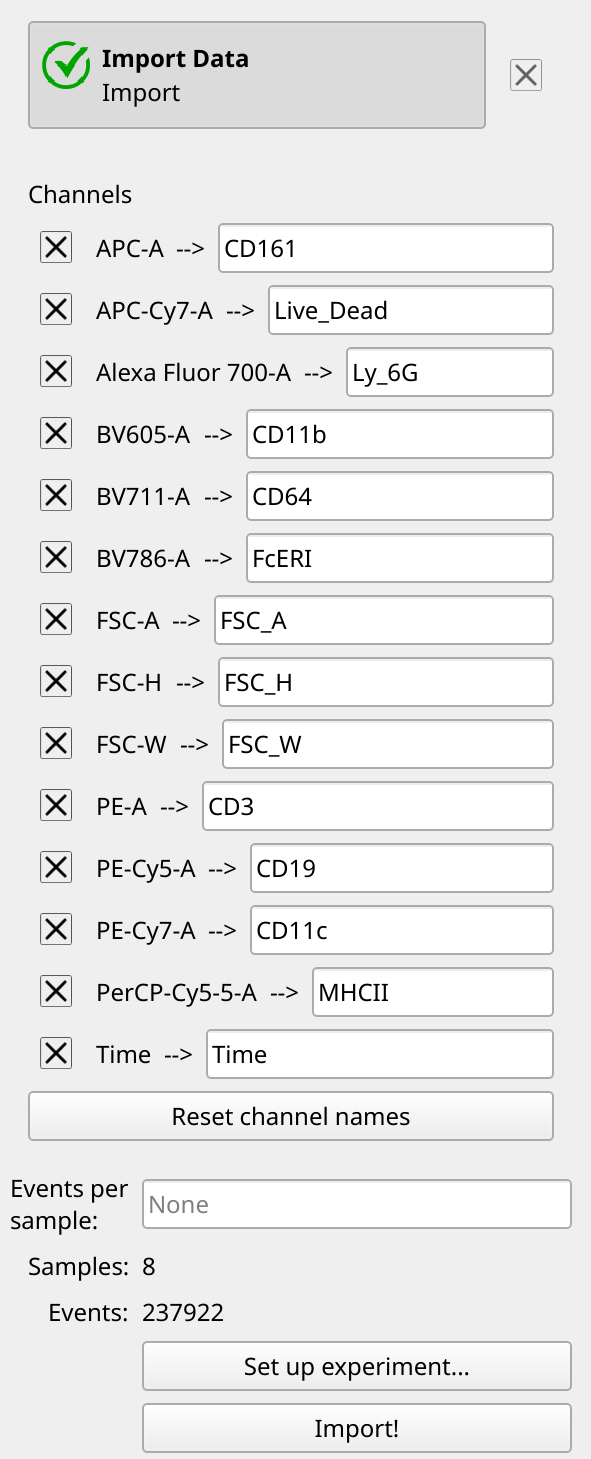
Click Import to import the data.
Gate for single, live cells#
The exported FCS files were not pre-gated to remove debris and clumps. Instead
of using a manual gate, let’s use a Density Gate gate on FSC_H and FSC_W
to select 80% of the events in the densest clusters. It’s more reproducible and
less biased than manual gating!

Of course, I say that, then turn around to draw a manual Range Gate on the
Live_Dead channel. This one is pretty obvious, though. Remember, the live
cells are the ones that don’t stain.

Clustering with self-organizing maps#
SOMs use a grid of interconnected “neurons” to that are trained to categorize high-dimensional inputs. For a reasonable panel like the 9-marker panel we’re using, the default settings seem to be fine, but there are a lot of other parameters that can be tweaked. See the Self Organizing Map module documentation for details. I also highly suggest reading this introduction and this tutorial – the Tuning the SOM Model section in that second link is particularly helpful!
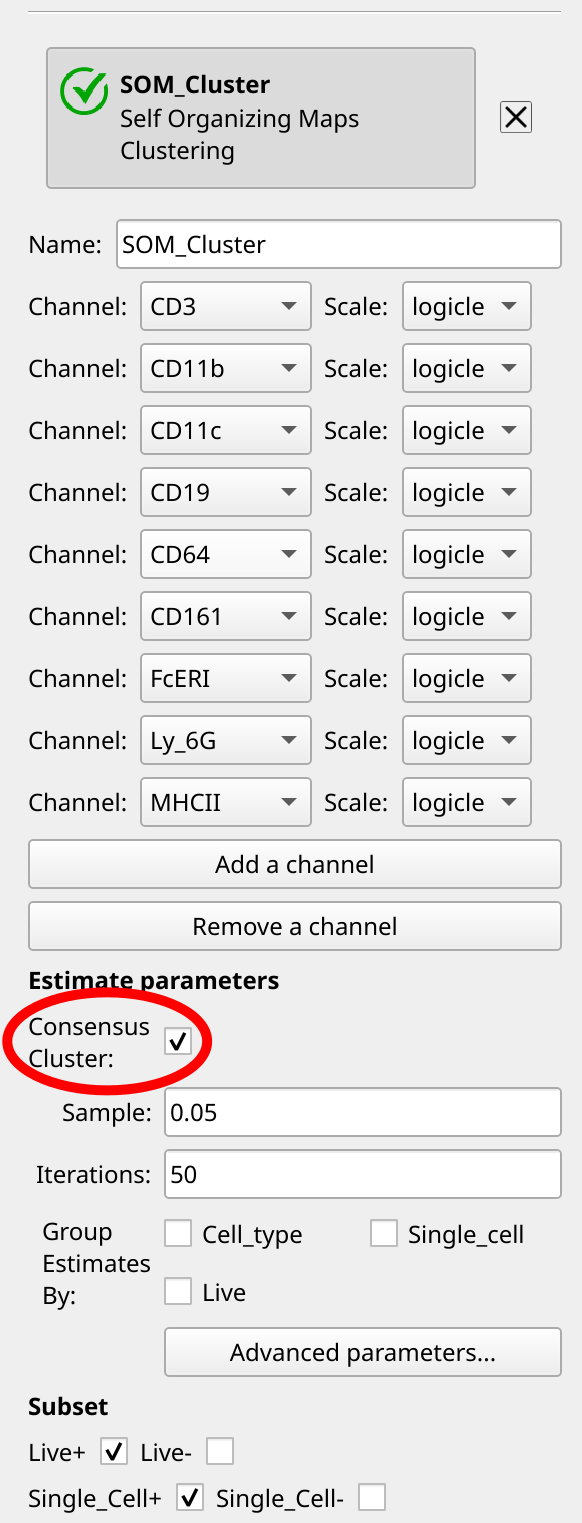
We use Self-Organizing Map operation just like any other data-driven operation –add the operation, set the parameters, and click Estimate. This one can take a minute or so on a decent computer, so be patient. This algorithm also works substantially better on scaled data, so we’ll scale each channel with the logicle biexponential scale before training the map.

In this example, we know the ground truth, but in general we won’t – so we need to use internal measures to evaluate the performance of our classifier. In this case, default view is a diagnostic view so we can get a sense of how well the training went. The top plot is a distance map, where each cell represents one neuron and the color represents how close the neuron is to its adjacent neurons. Think of it as a topographic map where the input data will cluster in the “valleys”. In this case, we can see that there is a “ridge” between two major “valleys” – we’ll see later if those correspond to any major cell types.
The other plot that the diagnostic view gives you is a plot of the quantization error over the training epochs. Lower quantization error means the model fits the data better. This should decrease, but it pretty much always looks asymptotic. If it doesn’t seem to have decreased much, increase the number of iterations, but beware – later iterations give you less of a decrease each time than earlier ones!
To use Cytoflow’s self-organizing map module effectively, it’s important to understand what it did. First, as we can see in the Experiment Browser, it added a statistic with the same name as the operation. Each row is a cluster and each column is one of the channels the model was trained on. The data in the statistic is the center of each cluster, which is used later for plotting the results.

The other thing the Self Organizing Map module does is create a new condition in the experiment, also named the same as the operation. This condition classifies each event as a member of one of the clusters – we can see this in the Experiment Browser as well.
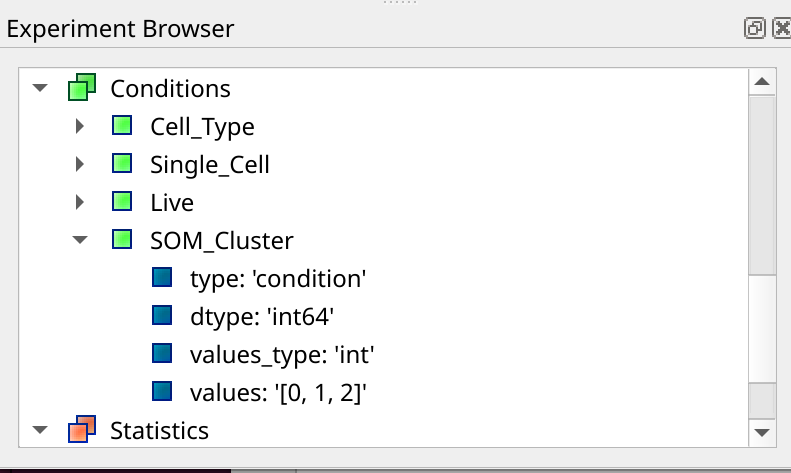
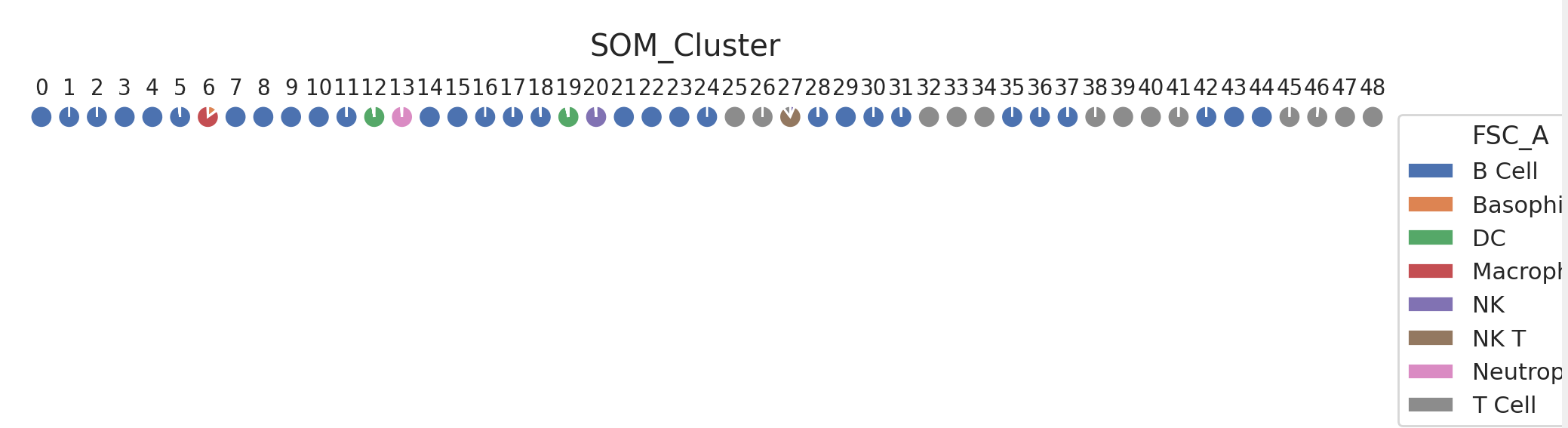
As we can see in the Experiment Browser, SOM only gave us three clusters – and there are definitely more cell types than that! Let’s see how each cluster is composed of the cell types. First, we’ll make a Channel Statistic and count events, broken out by SOM_Cluster and Cell_type and subsetted by both Live+ and Single_Cell+. (Since we’re counting, the channel doesn’t matter! I’ve set it to FSC_A.)

Let’s make some pie plots. The two views that can do that are Matrix View and Minimum Spanning Tree – Matrix View is easier to set up, so let’s use that.

Well. We got three clusters – one is mostly B cells, one is mostly T cells (with some NK and NK T cells), and one is “everything else” – DCs, macrophages, basophils, neutrohpils. The reason we ended up with only three clusters here is because most of the cells in the data set are B and T cells!
Can we do better? By default, the Cytoflow’s self organizing maps module uses consensus clustering to find the “natural” number of clusters – but sometimes we want more resolution. Remember that each neuron in the self-organizing map actually defines a cluster, so the “natural” clusters are actually clusters of clusters!
You can disable the consensus clustering by un-checking the Consensus Cluster option. You’ll need to re-estimate the SOM, but everything else should recompute automatically.
The matrix view is a little hard to interpret, though. There are definitely more distinct clusters, but it’s not clear how (or if) those clusters relate to eachother.
Remember how the SOM operation adds a statistic with the location of the center of each cluster? We can use this to our advantage, laying out the pie graphs with a Minimum Spanning Tree view.
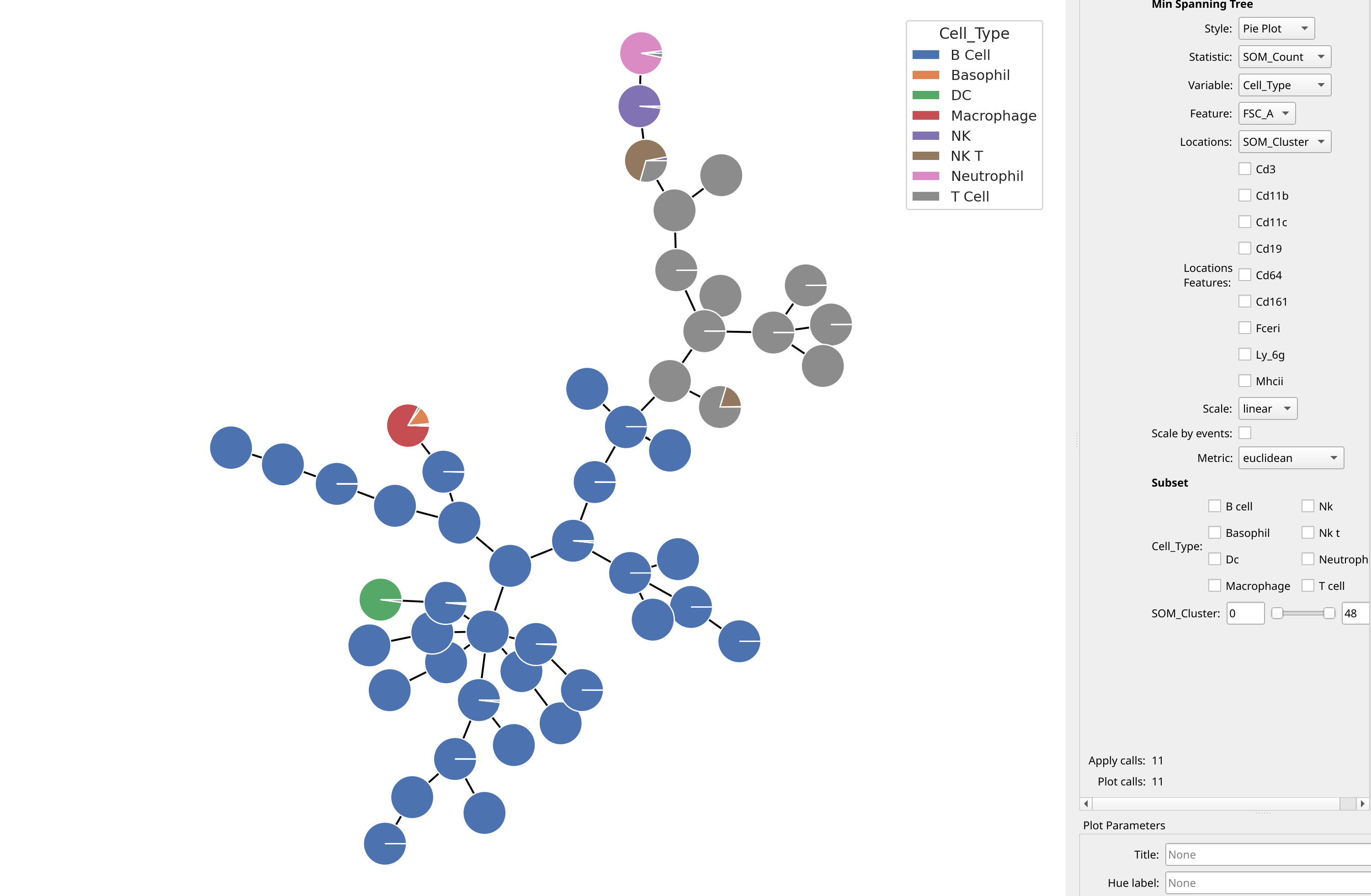
Much better! We can see that, while most of the clusters are (as expected) T and B cells, the DCs, NKs, NK Ts, and neutrophils have each (mostly) clustered with eachother. The macrophages and the basophils are in a single cluster – perhaps even more clusters would have distinguished them.
Note
If you would like, you can scale each pie plot by the number of events in that cluster, using the appropriate option to the Minimum Spanning Tree view.
Remember, though, that here we have the ground truth in this data set, and usually you won’t. Let’s use the same tree to plot different data – in this case, the geometric mean of each of the 9 marker channels.
First, we need to create a new statistic. We’ll use the Multi Channel Statistic to break the data set apart by different values of the SOM_Cluster condition, then compute the geometric mean for each channel in each subset.

Now we’ll plot a minimum-spanning tree with the same cluster locations but using the statistic we just created for the data. The key to using the minimum spanning tree view this way is to leave the variable and features blank – we want to plot the “whole” statistic, not just part of it. (When used this way, the MST and matrix views treat the features as the variables.)

Now we can see that the fairly obvious classes of cells and their marker levels. High CD19 (and mostly low owther things) are B cells; high CD3 (and mostly low other things) are T cells. But there are a few clusters that are different, and those correspond to the other cell types.
t-distributed Stochastic Neighbor Embedding#
Self-organizing maps (and other clustering algorithms like K-means and FlowPeaks) are classifiers – they take points in a high-dimensional space and sort them into bins based on a how close they are to eachother. These algorithms consider all of the dimensions – in this case, all 9 of the channels – but they are subject to the curse of dimensionality where increased numbers of dimensions make distance-based algorithms begin to fail.
Another approach is to reduce the number of dimensions, embedding the original high-dimensional data set into a lower-dimensional (usually 2) space. The trick is to do so in a way that retains the structure, keeping “close” observations in the higher-dimensional space still “close” in the lower-dimensional embedding.
t-distributed Stochastic Neighbor Embedding is an algorithm that promises to do just that. It is one of many non-linear dimensionality reduction methods – its benefit over linear dimensionality reductions such as principal components analysis (PCA) is that is more faithfully maintains local structure.
This comes with a cost, of course, and that cost is computational complexity! On this fairly modest data set, computing the embedding takes over four minutes to run. So be patient! The results are worth it, I promise. The tSNE module prints updates as it runs so you won’t think it’s crashed.
Also, the tSNE algorithm can also peform better or worse using different ways
of measuring “distance” in the original high-dimensional space. For two or three
channels, euclidean is fine, but for higher numbers of channels cosine seems
to work better. Finally, this performs much better on scaled data, so we’re
using logicle scale for all of the channels. Just as with self-organizing
maps, there are a number of parameters that can change the performance of the
algorithm. Read the operation documentation for details.
As with self-organizing maps, we add a tSNE operation and tell it what channels and scales to use.
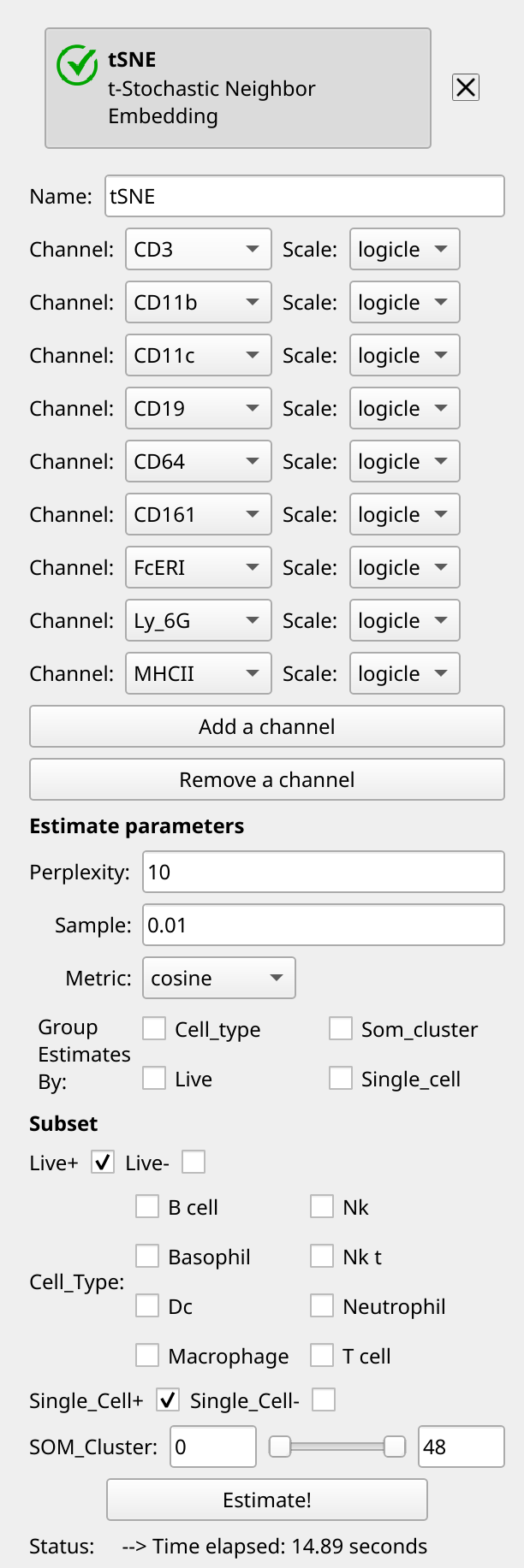
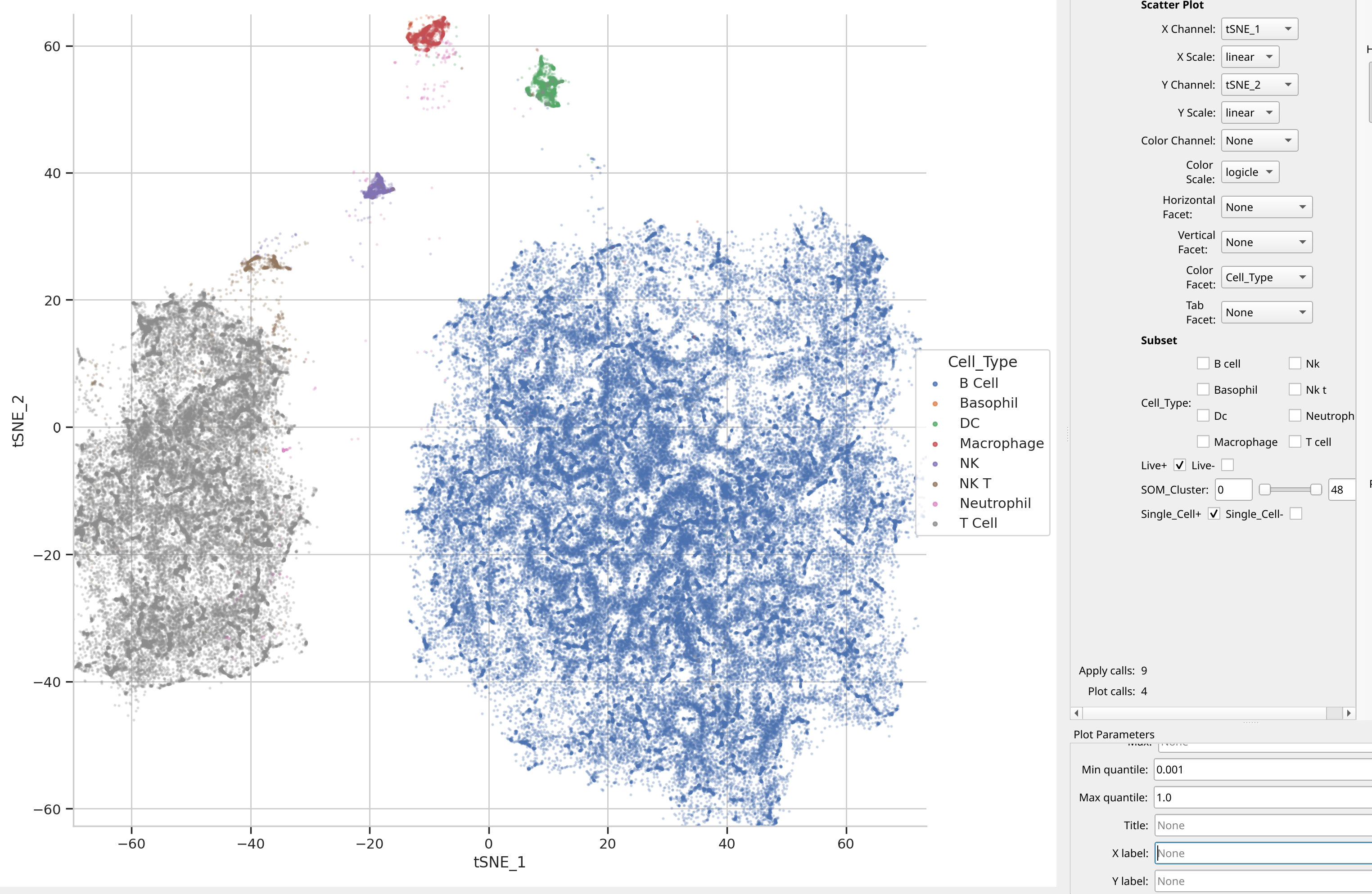
Note that the tSNE operation has added two synthetic “channels” to the experiment - t_SNE1 and tSNE_2. (These will change if you change the name of the operation.)

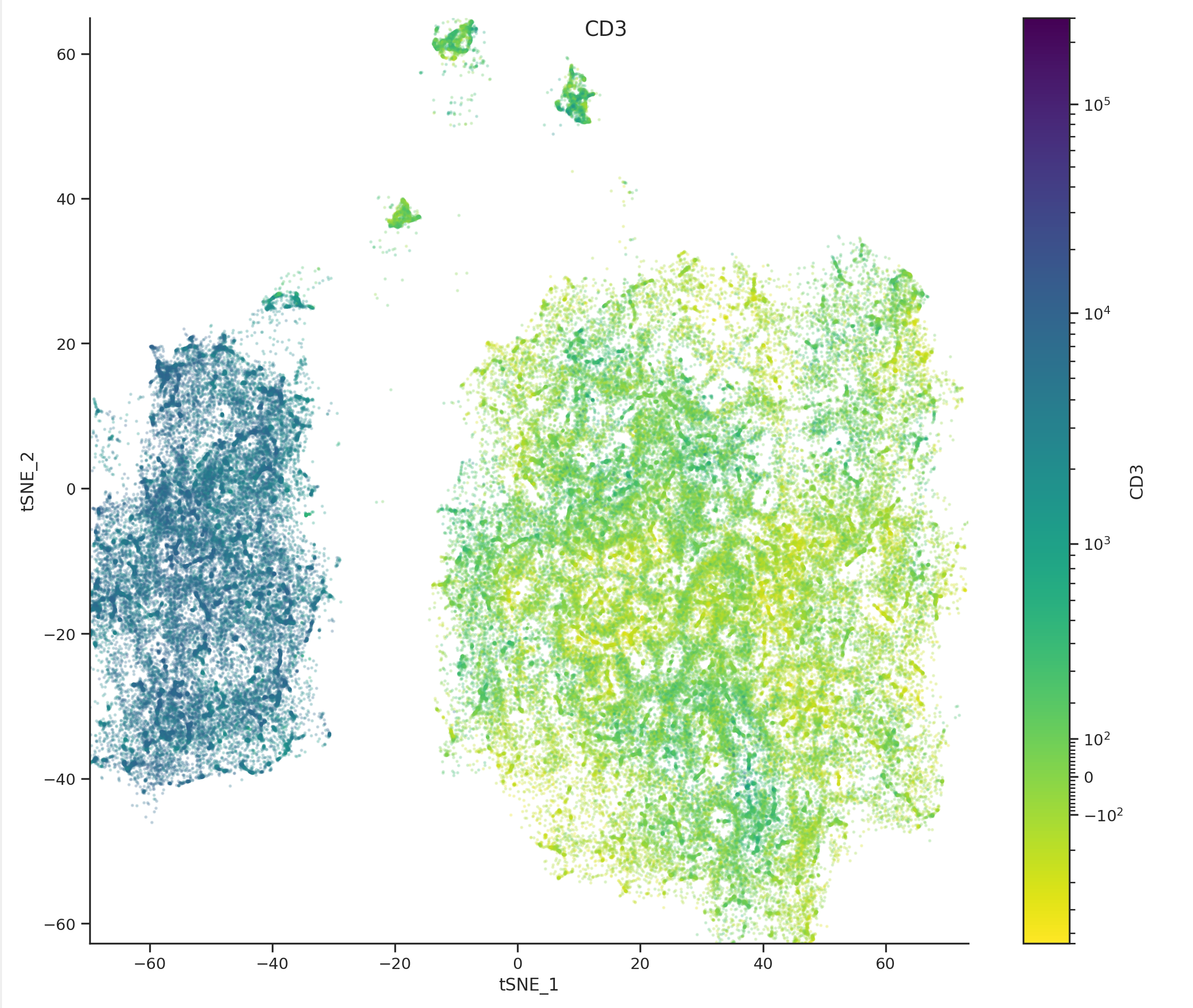
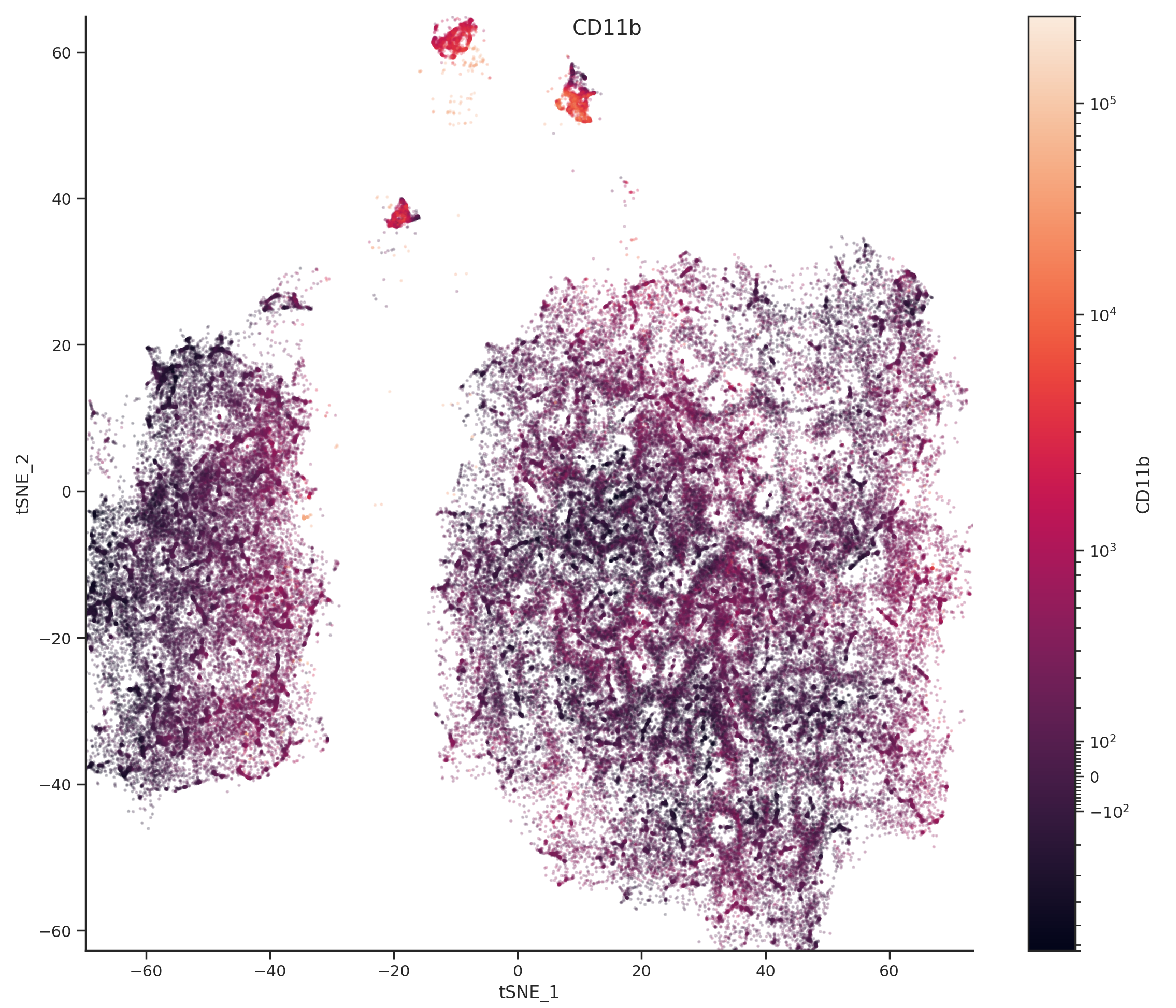
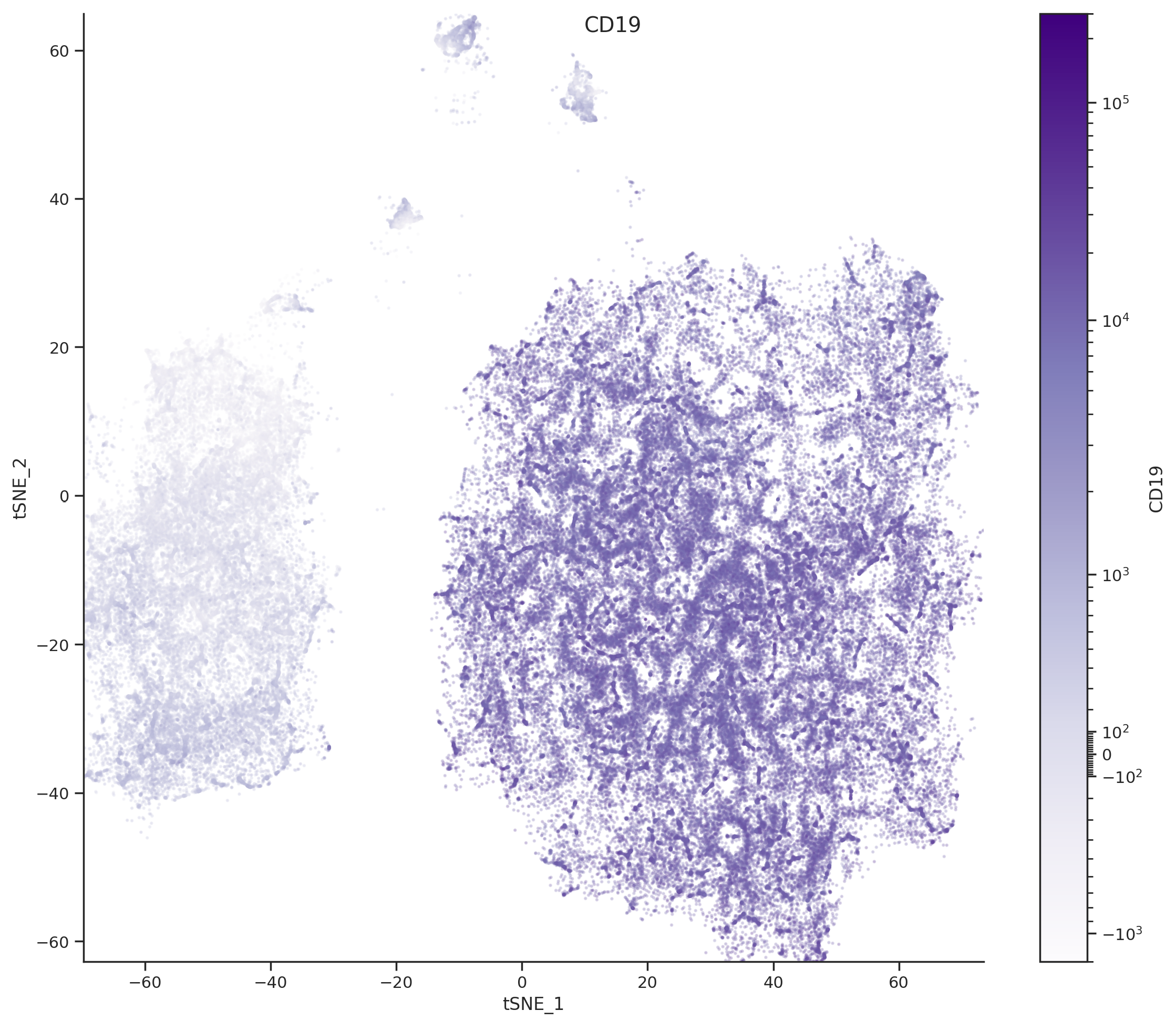
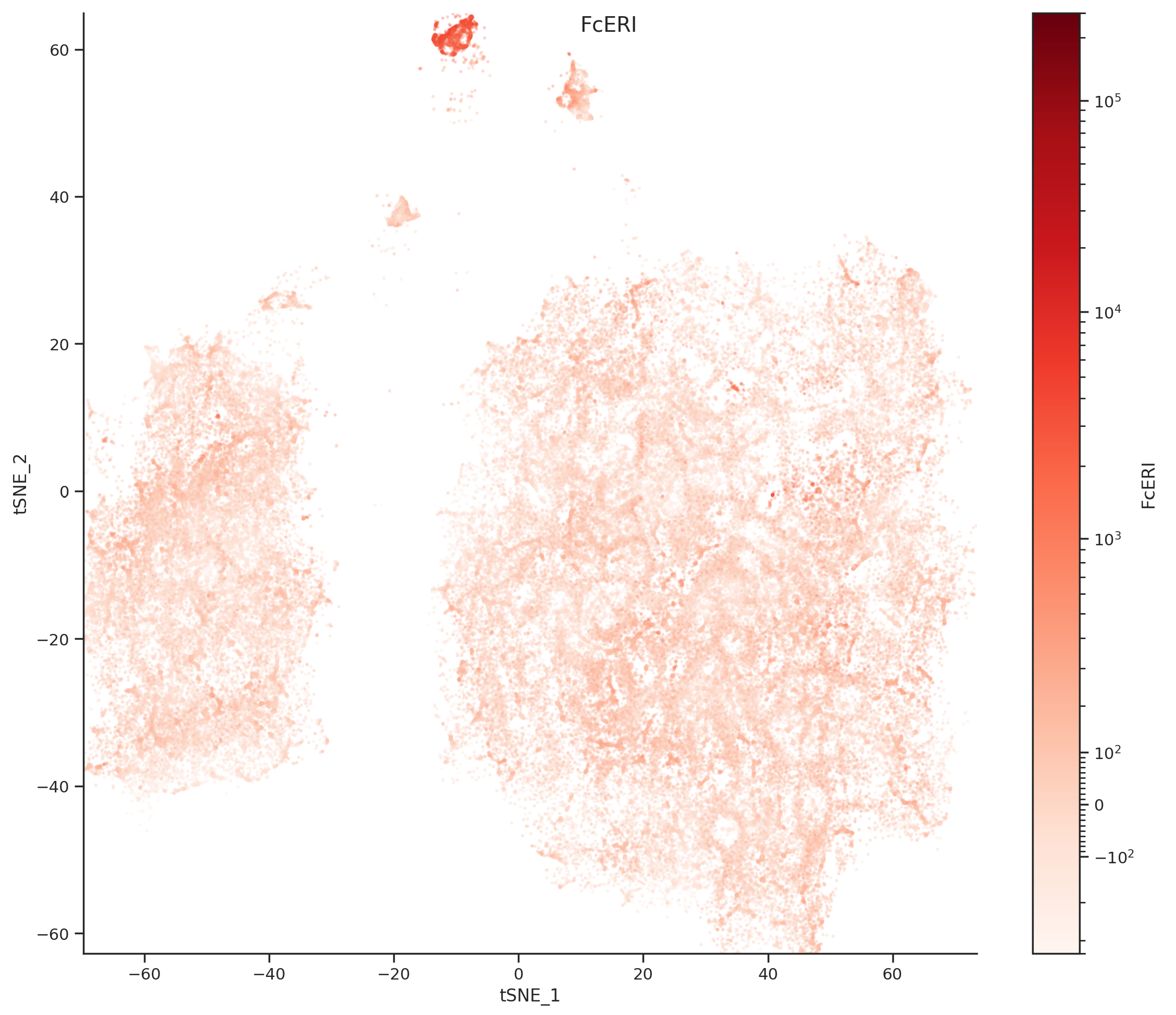
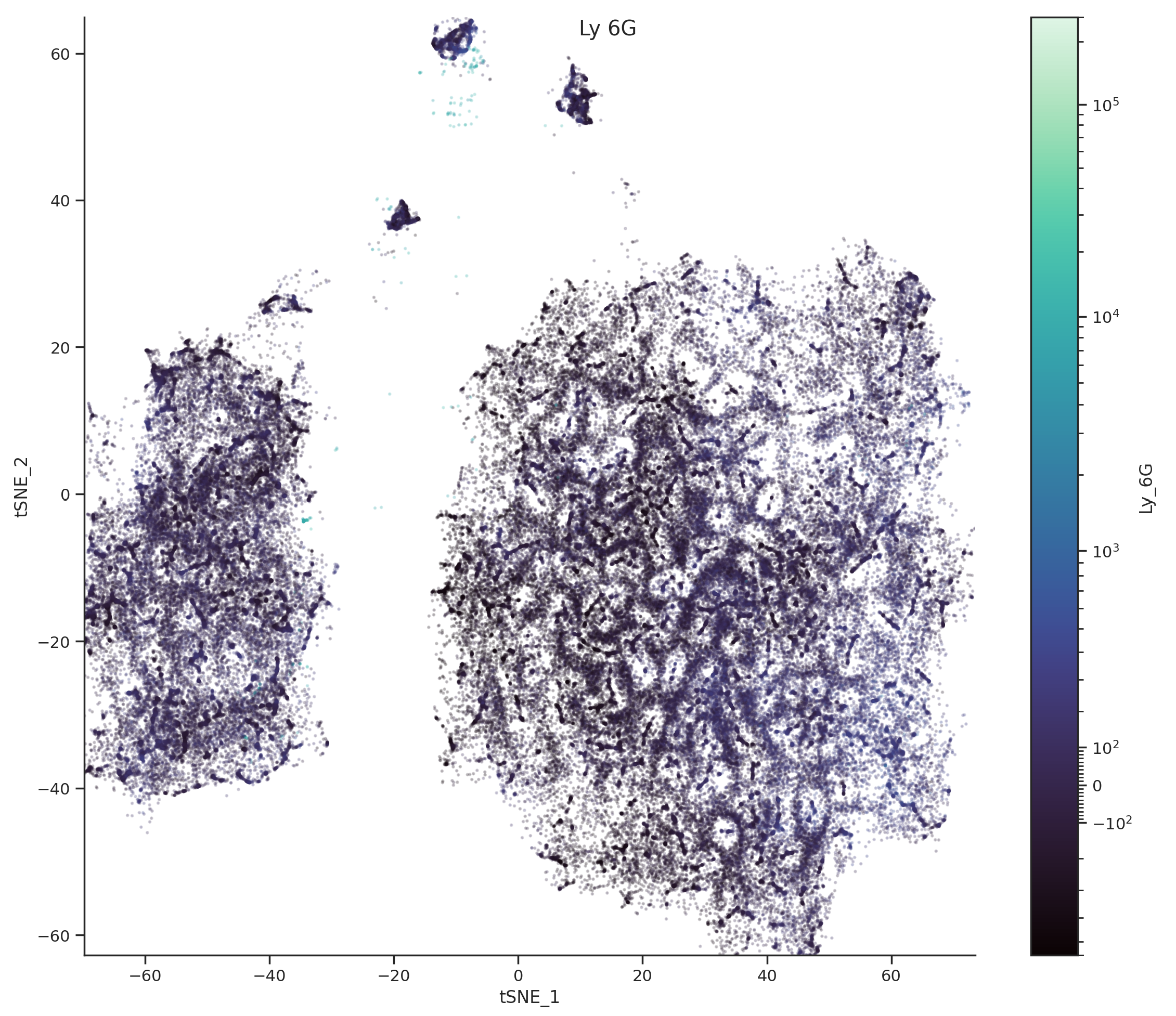
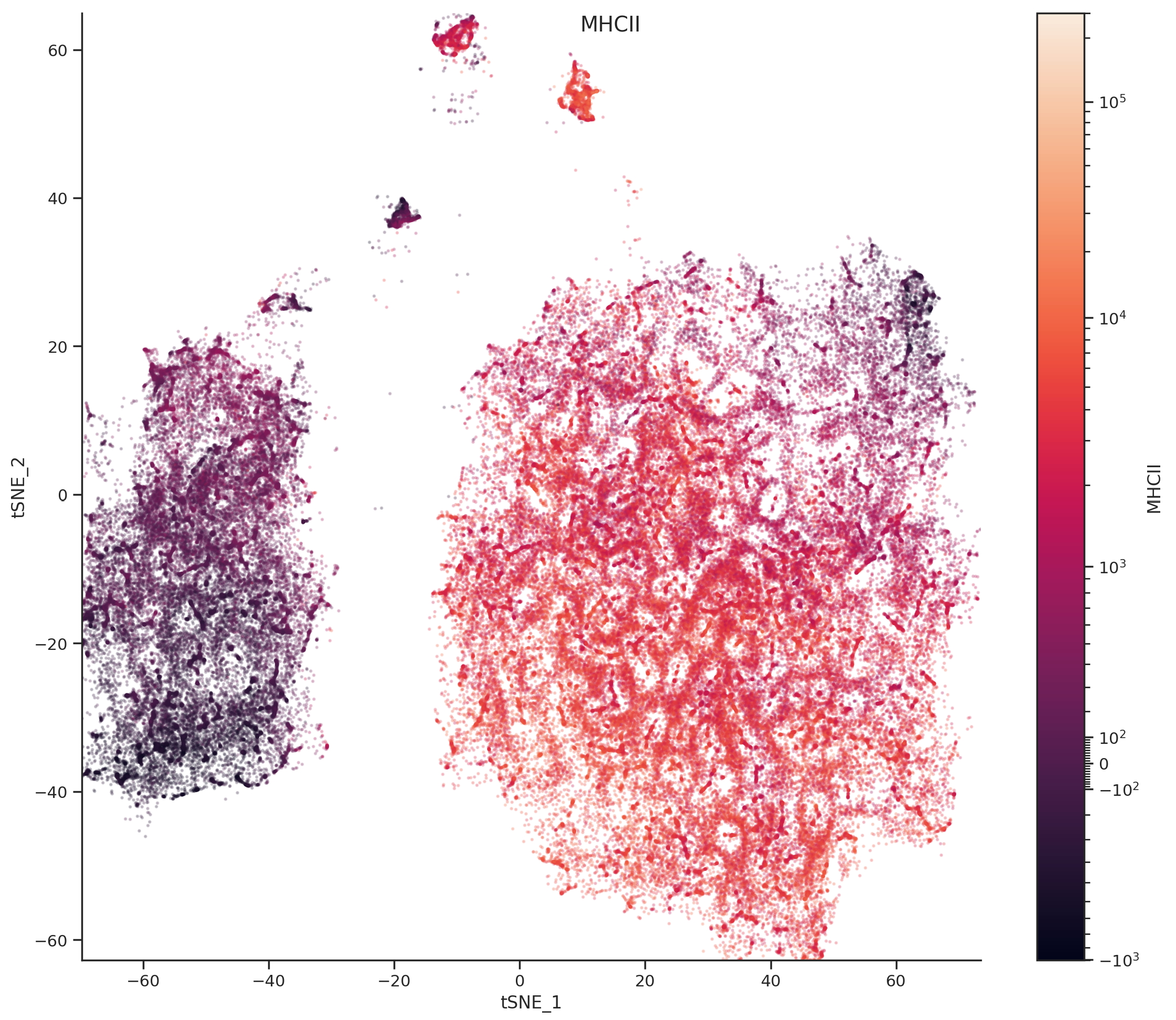
If we plot them on a scatter plot and color by cell type, we see that the different types mostly cluster together!
Again, we usually won’t have the ground truth – so it’s again good to evaluate the clusters by plotting the relative amounts of each marker in each cluster. The following graphs do so by setting the Color Channel and Color Scale attributes of the scatter plot, which relate the color of each event to the (scaled) value of a channel. I’ve also used different palettes, just to show off the various visual style options.